
智能(néng)制造示範産(chǎn)線(xiàn)
分(fēn)為(wèi)六大模塊,分(fēn)别為(wèi)機械加工(gōng)模塊、智能(néng)倉儲模塊、智能(néng)化綜合應用(yòng)模塊、智能(néng)物(wù)流及實訓模塊、控制及展示系統模塊、數字孿生及教學(xué)實訓模塊;這些矩陣化模塊既可(kě)以作(zuò)為(wèi)獨立的單台設備進行實訓教學(xué),又(yòu)可(kě)以整體(tǐ)聯動成為(wèi)一條完整的生産(chǎn)加工(gōng)産(chǎn)線(xiàn)。
一、機械加工(gōng)模塊
主要功能(néng)是數控車(chē)床車(chē)削加工(gōng)、加工(gōng)中(zhōng)心複雜工(gōng)藝加工(gōng)。
該模塊主要包括數控車(chē)床、加工(gōng)中(zhōng)心、六軸工(gōng)業機器人、機器人第七軸、接駁台、機器人視覺系統、夾具(jù)快換系統、控制台、RFID系統、人機交互系統、展示看闆系統、防護裝(zhuāng)置、工(gōng)裝(zhuāng)夾具(jù)輔助物(wù)料等部分(fēn)。該模塊平面布局圖及效果圖如圖1、圖2、圖3、圖4所示。
該模塊工(gōng)藝流程如下。物(wù)流轉運系統将工(gōng)裝(zhuāng)載闆(帶毛坯)放置在接駁台,接駁台處的RFID系統讀取工(gōng)裝(zhuāng)載闆信息,接駁台将工(gōng)裝(zhuāng)載闆輸送至暫存位置。工(gōng)業機器人換取合适夾具(jù),在視覺系統輔助下将毛坯件放置數控車(chē)床内。數控車(chē)床加工(gōng)完畢後,再由工(gōng)業機器人取出物(wù)料,放回工(gōng)裝(zhuāng)載闆。接駁台将工(gōng)裝(zhuāng)載闆(帶半成品)輸送出該模塊。物(wù)流轉運系統将工(gōng)裝(zhuāng)載闆(帶半成品)輸送至其他(tā)模塊。接駁台處的RFID系統讀取載闆信息。
工(gōng)業機器人實訓台可(kě)用(yòng)于工(gōng)業機器人實訓,可(kě)以進行工(gōng)業機器人基本操作(zuò),基于視覺系統的機器人操作(zuò)。工(gōng)業機器人第七軸可(kě)以讓工(gōng)業機器人在兩個工(gōng)位間自由切換。展示看闆系統可(kě)以實時數控車(chē)床工(gōng)作(zuò)參數或數控車(chē)床實時加工(gōng)實況。
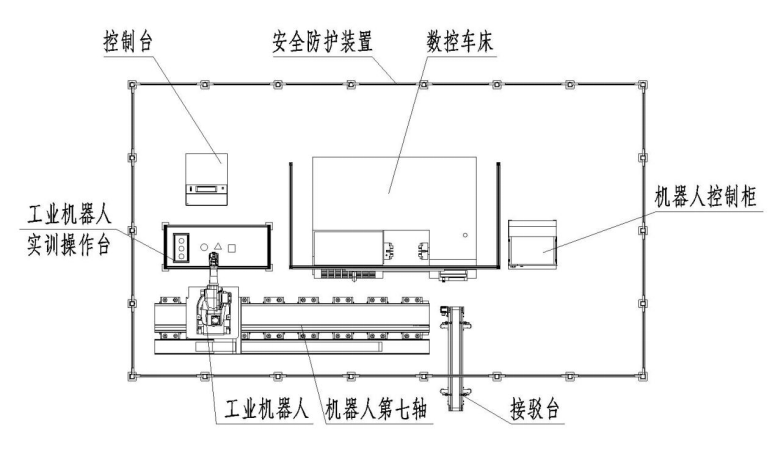
圖1 數控車(chē)床模塊平面布局圖
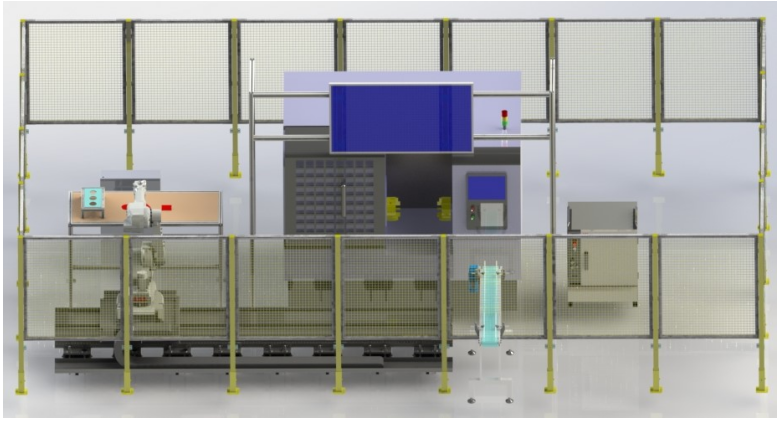
圖2 數控車(chē)床模塊布局圖
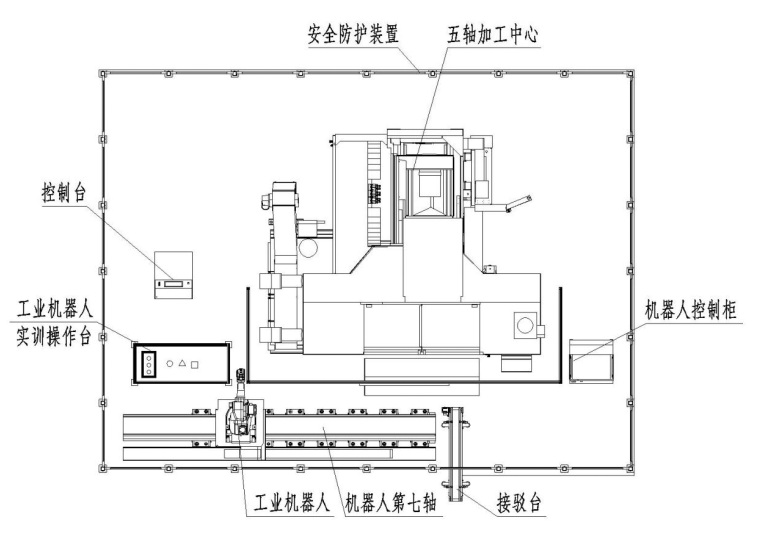
圖3 五軸加工(gōng)中(zhōng)心模塊平面布局圖
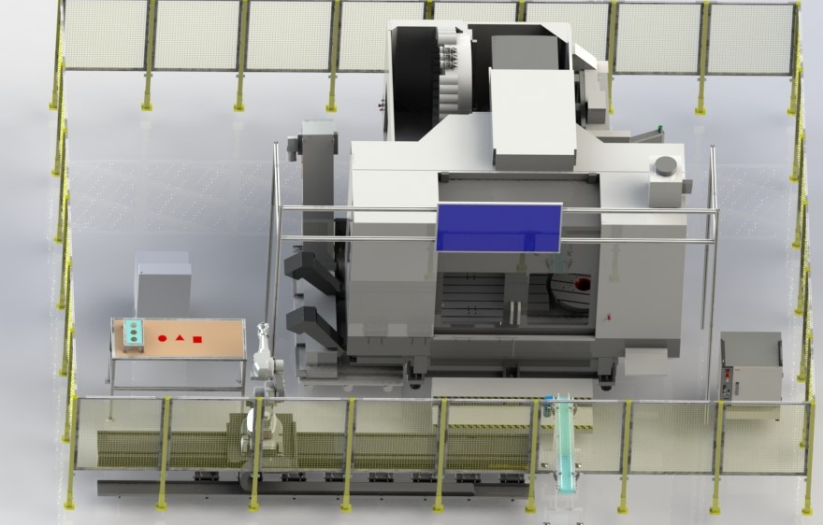
圖4 數控車(chē)床模塊布局圖
二、智能(néng)倉儲模塊
智能(néng)倉儲模塊主要功能(néng)是存儲加工(gōng)件毛坯與成品,可(kě)以實現自動、手動存取物(wù)料,還可(kě)以用(yòng)于三軸機械手實訓教學(xué),三軸機械手的數字孿生教學(xué)。
該模塊主要包括貨架、雙向貨叉堆垛機、進出庫平台、工(gōng)裝(zhuāng)載闆、RFID系統、智能(néng)倉儲控制系統、WMS倉儲管理(lǐ)系統、控制台、人機交互系統、展示看闆系統、防護裝(zhuāng)置等部分(fēn)。該模塊平面布局圖及效果圖如圖5、圖6所示。
該模塊工(gōng)藝流程如下。堆垛機将工(gōng)裝(zhuāng)載闆(帶毛坯)輸送至出庫平台,由物(wù)流轉運系統轉運,流入其他(tā)模塊。出庫平台的RFID系統讀取載闆信息。物(wù)流轉運系統将工(gōng)裝(zhuāng)載闆(帶成品)輸送至入庫平台,由堆垛機放置庫位上。入庫平台的RFID系統讀取載闆信息。
展示看闆系統可(kě)以實時展示庫位信息。
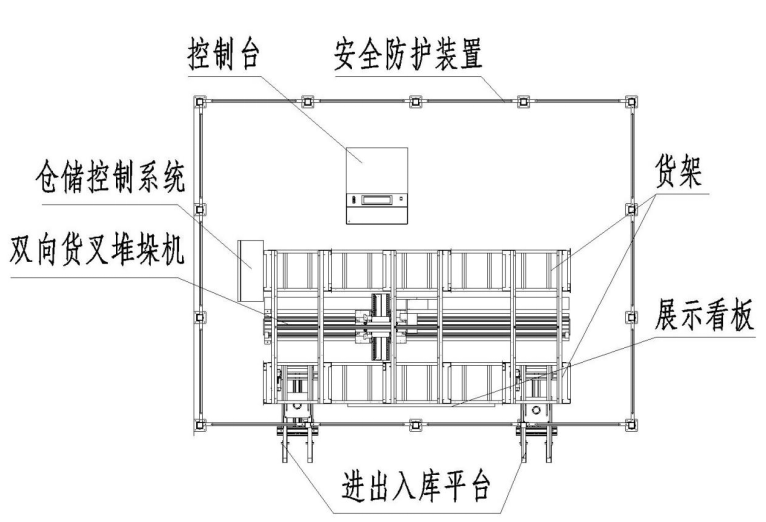
圖5 智能(néng)倉儲模塊平面布局圖

圖6 智能(néng)倉儲模塊布局圖
三、智能(néng)化綜合應用(yòng)模塊
智能(néng)化綜合應用(yòng)模塊主要功能(néng)是對加工(gōng)後的工(gōng)件進行檢測,并将不同的工(gōng)件進行裝(zhuāng)配,裝(zhuāng)配完成後的工(gōng)件進行激光打标,還可(kě)以用(yòng)于視覺檢測系統、協作(zuò)機器人、機器人力控系統等實訓教學(xué)。
該模塊主要包括協作(zuò)機器人、力控系統、機器人底座、接駁台、機器人視覺系統、夾具(jù)快換系統、控制台、RFID系統、激光打标系統、人機交互系統、展示看闆系統、防護裝(zhuāng)置、工(gōng)裝(zhuāng)夾具(jù)輔助物(wù)料等部分(fēn)。該模塊平面布局圖及效果圖如圖7、圖8所示。
該模塊工(gōng)藝流程如下。物(wù)流轉運系統将工(gōng)裝(zhuāng)載闆(帶成品)放置在接駁台,接駁台處的RFID系統讀取工(gōng)裝(zhuāng)載闆信息,接駁台将工(gōng)裝(zhuāng)載闆輸送至暫存位置。一号協作(zuò)機器人換取合适夾具(jù),在視覺系統輔助下将毛坯件放置檢測裝(zhuāng)置内。檢測完成後,再由一号協作(zuò)機器人取出物(wù)料,放在物(wù)料中(zhōng)轉台。再由二号裝(zhuāng)配協作(zuò)機器人,在力控系統輔助下,将工(gōng)件進行裝(zhuāng)配,裝(zhuāng)配完成後放置在激光打标處進行打标,完成後再放置回物(wù)料中(zhōng)轉台。再由一号協作(zuò)機器人将工(gōng)件放回工(gōng)裝(zhuāng)載闆。由接駁台将工(gōng)裝(zhuāng)載闆(帶成品)輸送出該模塊。物(wù)流轉運系統将工(gōng)裝(zhuāng)載闆(帶成品)輸送至其他(tā)模塊。接駁台處的RFID系統讀取載闆信息。
協作(zuò)機器人實訓台可(kě)用(yòng)于協作(zuò)機器人實訓,可(kě)以進行協作(zuò)機器人基本操作(zuò),基于力控系統的協作(zuò)機器人操作(zuò)。展示看闆系統可(kě)以展示檢測結果。
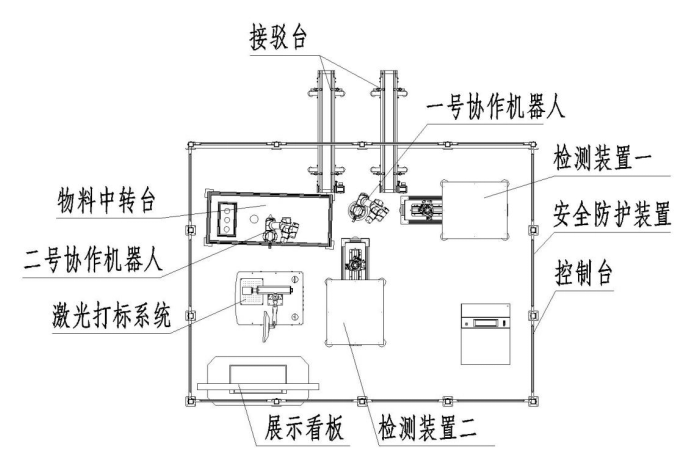
圖7智能(néng)綜合應用(yòng)模塊平面布局圖
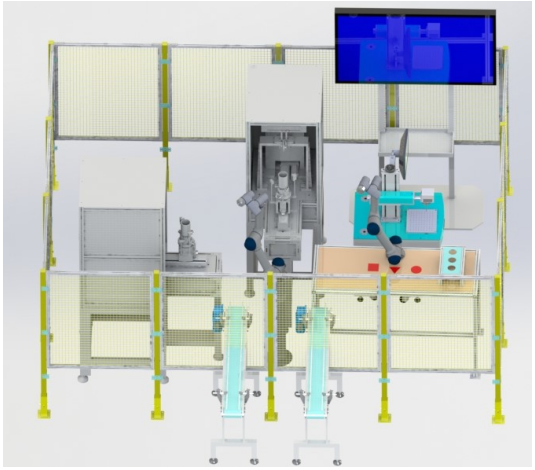
圖8 智能(néng)綜合應用(yòng)模塊布局圖
四、總控及展示系統模塊
總控及展示系統模塊主要功能(néng)是對整條智能(néng)生産(chǎn)線(xiàn)進行整體(tǐ)控制,并将生産(chǎn)線(xiàn)的信息進行實時綜合展示。
該模塊主要包括總控系統、視頻監控系統、MES系統、電(diàn)子看闆系統、防護裝(zhuāng)置、網絡系統等部分(fēn)。該模塊平面布局圖及效果圖如圖9、圖10所示。
總控系統控制整體(tǐ)生産(chǎn)線(xiàn)的運行,展示系統可(kě)以展示生産(chǎn)線(xiàn)綜合信息,MES系統是總協調系統,視頻監控系統可(kě)實時展示數控車(chē)床及加工(gōng)中(zhōng)心内部工(gōng)作(zuò)情況。
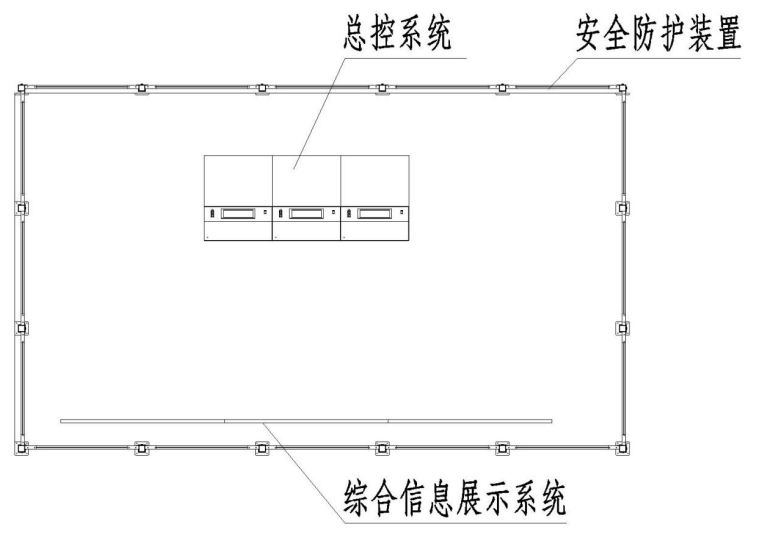
圖9 總控及展示系統模塊平面布局圖
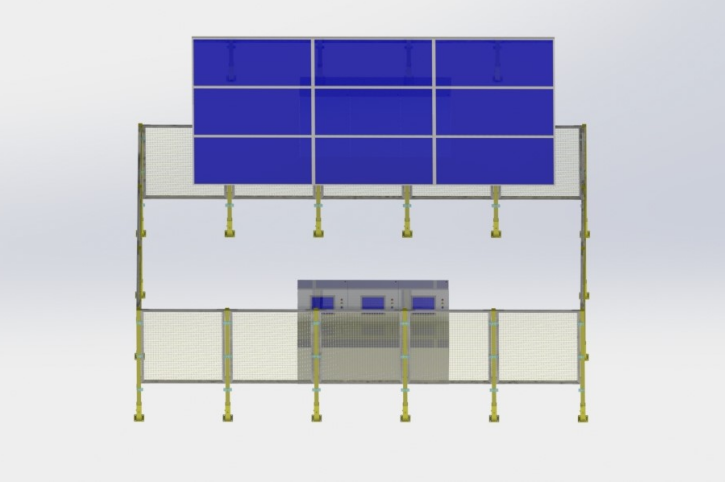
圖10 總控及展示系統模塊布局圖
五、智能(néng)物(wù)流及實訓模塊
智能(néng)物(wù)流及實訓模塊主要功能(néng)是用(yòng)于各模塊之間工(gōng)件的轉運,也可(kě)以用(yòng)于複合機器人的實訓。
該模塊主要包括複合機器人系統、調度系統、控制台、物(wù)流中(zhōng)轉台、防護裝(zhuāng)置等部分(fēn)。該模塊平面布局圖及效果圖如圖11、圖12所示。
控制系統控制該模塊的運行,調度系統控制兩台複合機器人的運動,物(wù)流中(zhōng)轉台用(yòng)于中(zhōng)轉站點,用(yòng)于實訓。

圖11 智能(néng)物(wù)流及實訓模塊平面布局圖
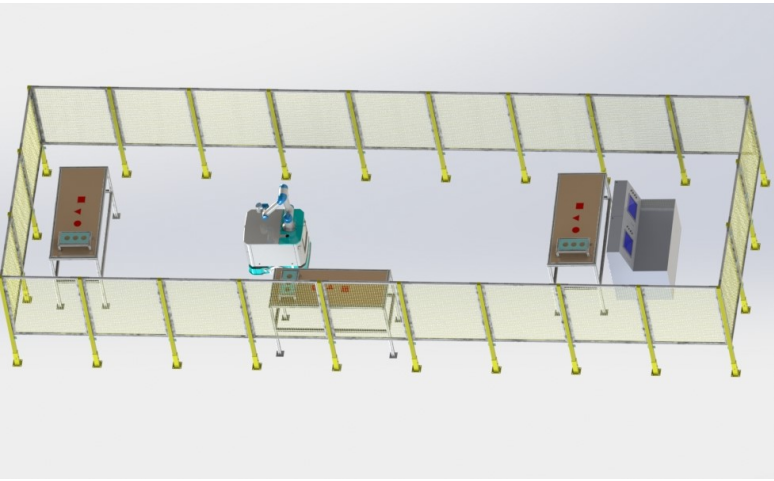
圖12 智能(néng)物(wù)流及實訓模塊布局圖
六、數字孿生及教學(xué)實訓模塊
數字孿生及教學(xué)實訓模塊主要功能(néng)是進行數字孿生教學(xué)及實訓。
該模塊主要包括數字孿生軟件、學(xué)生桌椅、二聯顯示屏、服務(wù)器、計算機及顯示器、教學(xué)培訓課程、防護裝(zhuāng)置等部分(fēn)。該模塊平面布局圖及效果圖如圖13、圖14所示。
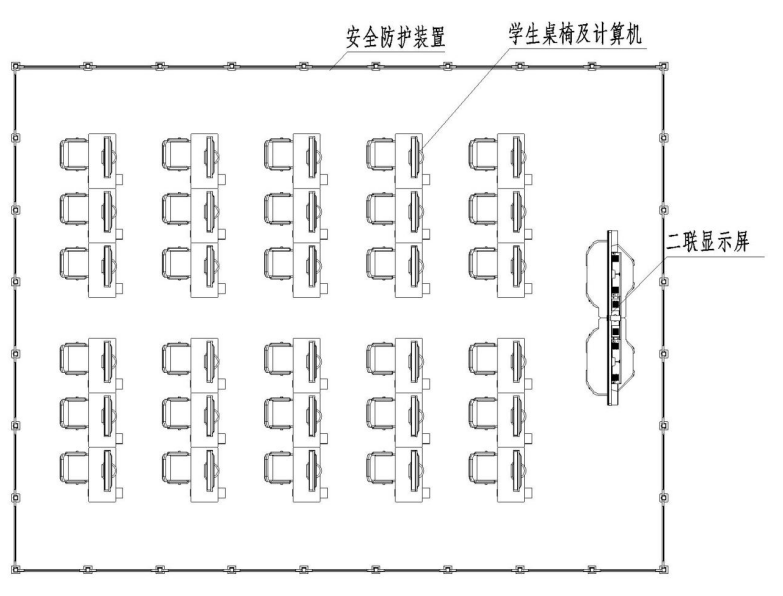
圖13 數字孿生及教學(xué)實訓模塊平面布局圖
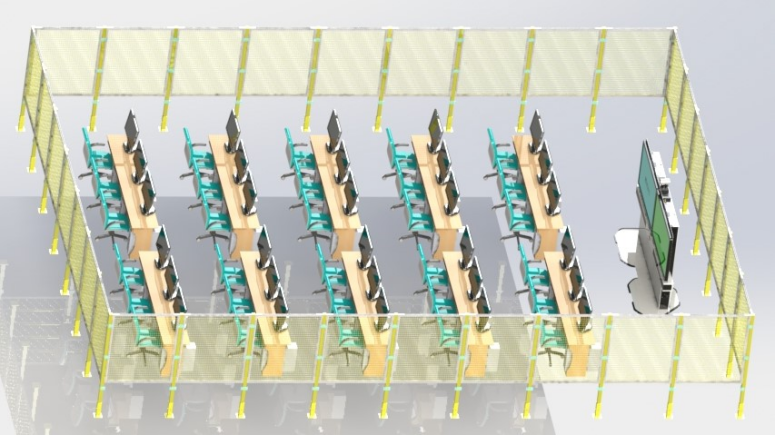
圖14 數字孿生及教學(xué)實訓模塊布局圖
